Maquette 1 : énoncé
TP : Traitement du signal
Objectif
L'objectif de ce TP est de mesurer la vitesse du son dans l’air en utilisant le matériel fourni.
Introduction
La mesure de la vitesse du son est une expérience qui remonte à plusieurs siècles. Dès le XVIIe siècle, des scientifiques comme Isaac Newton et Robert Boyle ont commencé à étudier les propriétés acoustiques du son. En 1660, le physicien et astronome irlandais Robert Boyle a réalisé l'une des premières expériences de mesure de la vitesse du son en plaçant des spectateurs à des distances variables d'un canon. En observant la différence de temps entre l'impact visuel et le sonore de la détonation, Boyle a pu estimer la vitesse du son à environ 332 m/s.
Au XVIIIe siècle, le scientifique français 🇫🇷 Pierre-Simon Laplace a proposé une méthode pour mesurer la vitesse du son en utilisant des réflexions sonores. Cette technique a été perfectionnée par d'autres scientifiques, notamment Ernst Chladni et Charles Wheatstone, qui ont utilisé des plaques de verre et des tuyaux résonateurs pour mesurer la vitesse du son.
Au XIXe siècle, le physicien allemand Ernst Mach a utilisé des tambours tournants pour mesurer la vitesse du son dans différents gaz, tandis que le scientifique britannique Lord Rayleigh a étudié la propagation du son dans l'air et l'eau.
Aujourd'hui, la mesure de la vitesse du son est effectuée à l'aide de technologies modernes, telles que des microphones, des ordinateurs et des capteurs de pression. Cette mesure est utilisée dans de nombreux domaines, notamment l'aéronautique, l'acoustique architecturale et la médecine.
Utilisation du module traitsignfip
Le module traitsignfip regroupe de fonctions particulières pour faire les TP.
Il s’agit d’un unique fichier téléchargeable sur : https://github.com/vincmazet/traitsignfip.
Une fois le fichier téléchargé, il suffit de l’ajouter dans le dossier contenant le notebook.
L’aide des fonctions de ce module est accessible directement sur la page web du module, ou bien en utilisant l’instruction help(fonction). Par exemple :
import traitsignfip as trtfip
help(trtfip.play_and_record)
Help on function play_and_record in module traitsignfip:
play_and_record(signal_type, time)
Acquisition du son via microphone.
Entrées :
signal_type (string) : nom du signal envoyé sr l'haut-parleur pour l'acquérir avec les micros.
time (decimal) : valeur de l'enregistrement en seconde
signal_type:
-noise : bruit blanc.
-sinus : sinusoïde de 440Hz.
-clap : simulation d'un claquement avec une sinusoïde.
Sortie :
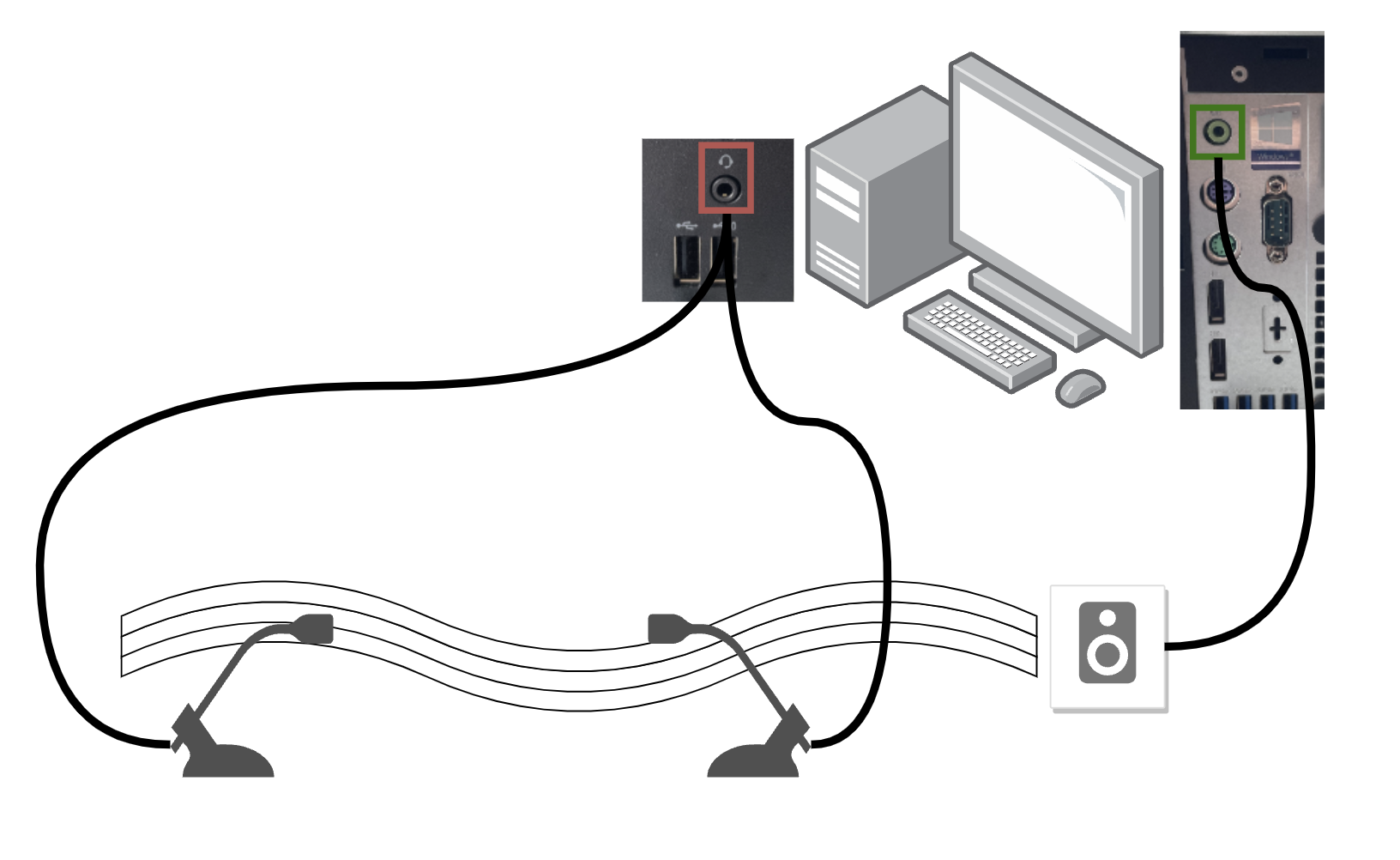
aucuneMatériel
- Haut-parleur 🔈
- Deux microphones 🎤
- Une règle 📏
- Ordinateur avec Python et Jupyter Notebook installés
Première partie
- Quel est le matériel nécessaire pour réaliser cette expérience ?
- Comment peut-on mesurer la vitesse du son ?
- Quel outil vu en cours va nous permettre de déduire le décalage temporelle entre les deux acquisitions de nos microphones ?
- Comment peut-on minimiser les bruits captés par les microphones ?
- Etudier les acquisitions pour différents signaux générés par la librairie
traitsignfip
Deuxième partie
L’objectif de cette partie est d’utiliser les deux microphones sans l’Haut-parleur et de trouver un moyen d’acquérir un signal significatif afin de pouvoir calculer le décalage temporel entre les deux acquisitions.
Dans la librairie traitsignfip la fonction record vous permet de faire l’acqusiition sans haut-parleur.